随着人形机器人向高动态、高集成度与强感知能力演进,其“神经系统”——高频信号传输链路——正面临机械与电气双重挑战。视觉、雷达、IMU等多路高速数据流,必须在紧凑空间内通过柔性连接器实现可靠传输。
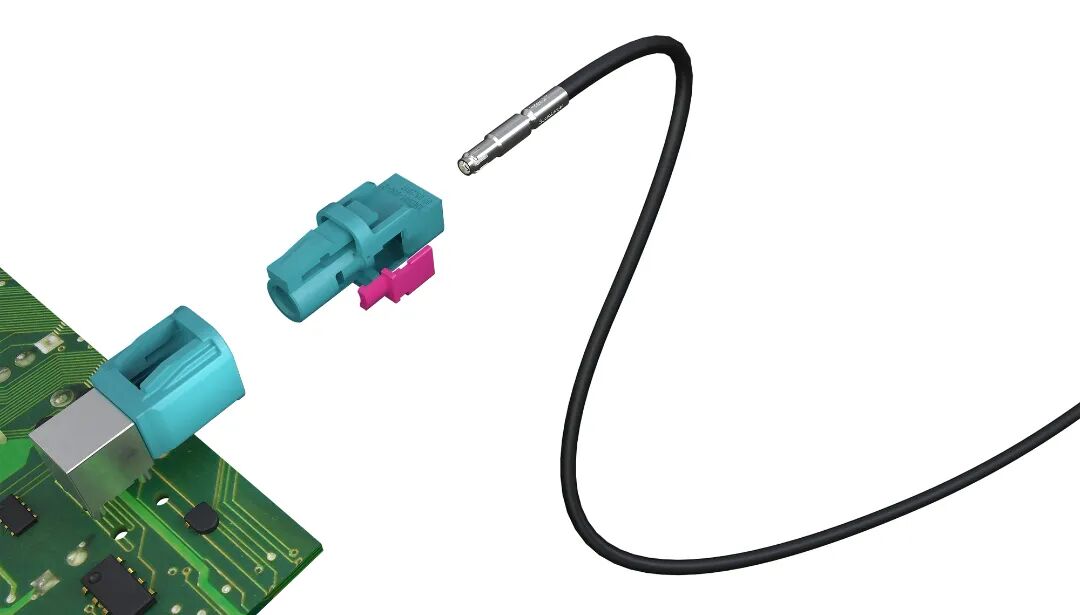
罗森伯格HFM®(High-Speed FAKRA Mini)连接器凭借小型化、高频化、低成本等优势,正成为机器人领域的优选方案。而在人形机器人的关节、颈部、手腕等持续弯折与扭转的动态部位,HFM®同轴组件的柔性耐折弯扭转性能,直接决定了信号完整性与整机寿命。
01. 应用场景与受力特征:HFM®面临哪些严苛工况?
在人形机器人内部,HFM®连接器主要承担两类高频信号任务:
这些HFM®线束需穿过的关键运动部位及其受力如下:

在这些场景下,线束不仅要耐受数万至数十万次动态弯折/扭转,还必须保持:
单端特性阻抗稳定在 50Ω
插入损耗与回波损耗 不显著劣化

02. 面向机器人关节的关键设计改进
针对高频率、多维度运动的严苛要求,HFM®连接器在结构上进行了以下对比性优化:
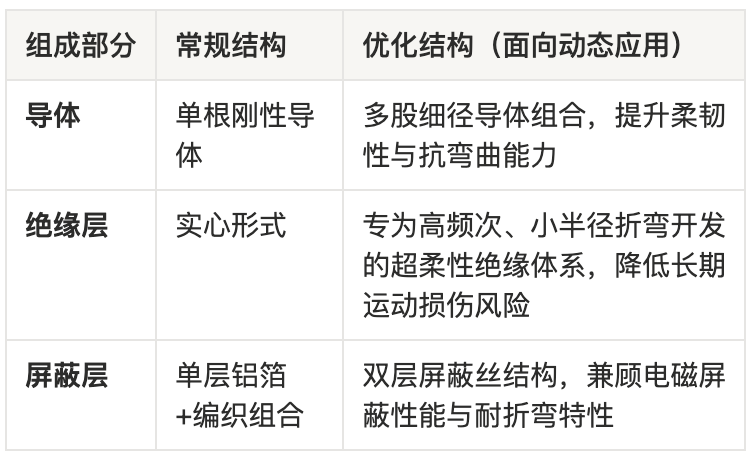
经上述优化后:
此外,在端子与锁定机构方面也做了针对性改进:
端子接触区:增加多点触点结构,配合特种镀层技术,提升组件寿命
线缆-端子压接区:增加应力释放套筒与热缩弹性体过渡段,避免弯折应力集中
连接器外壳:采用金属-塑胶复合卡钩技术,允许1mm浮动容差,释放扭转应力
5万次扭转,5D弯折:HFM®让机器人关节更”耐造“。
03. 测试标准建议:超越汽车,接近航天/医疗级
现行HFM®连接器通常遵循LVDS协议与USCAR-2(汽车)标准,其弯折测试多为静态或短期。针对人形机器人应用,建议采用以下更严苛的自定义验证序列:
1. 摇摆测试(弯折类组件)
2. 复合扭转测试(扭转类组件)
安装方式:专用六轴机械臂模拟测试台
吊重:250g
扭转角度:±180°
速度:40~60次/分钟
循环次数:300万次
监测:全程电气连续性监测
失效分析:试验后检查导体及屏蔽层状态
3. 复合工况测试(扭转+折弯)
模拟机械臂同时进行扭转与折弯
循环次数:≥10万次
监测:持续监测电气连续性及插入损耗、回波损耗变化
失效分析:采用定制化X射线显微成像 评估:
以上测试序列旨在验证组件在人形机器人长期动态运动中的信号完整性是否满足要求
人形机器人正在从“能动的机械”进化为高带宽感知与敏捷交互的具身智能体。
HFM®连接器作为高频信号的物理载体,其50Ω特性阻抗的稳定性与柔性耐弯折扭转能力,直接决定了机器人能否在长期动态运动中保持“神经畅通”。
从导体结构、屏蔽工艺、端子镀层、测试规范四个维度进行面向柔性动态的专用化设计,才能真正支撑起下一代人形机器人的高频信号——稳定、耐用、可靠。






